Svejserobotarbejdscelle / svejserobotarbejdsstation

Svejserobottens arbejdscellekan bruges i fremstilling, installation, testning, logistik og andre produktionsled og er meget udbredt i biler og bildele, entreprenørmaskiner, jernbanetransport, lavspændingsapparater, elektricitet, IC-udstyr, militærindustrien, tobak, finans, medicin, metallurgi, trykkeri- og forlagsindustrien har en bred vifte af anvendelser. Det letter ikke kun virksomhedsovervågning, sparer omkostninger, men garanterer også svejsekvalitet, stabil effektivitet og høj sikkerhedsydelse. Det er et valg for en bred vifte af brugere.
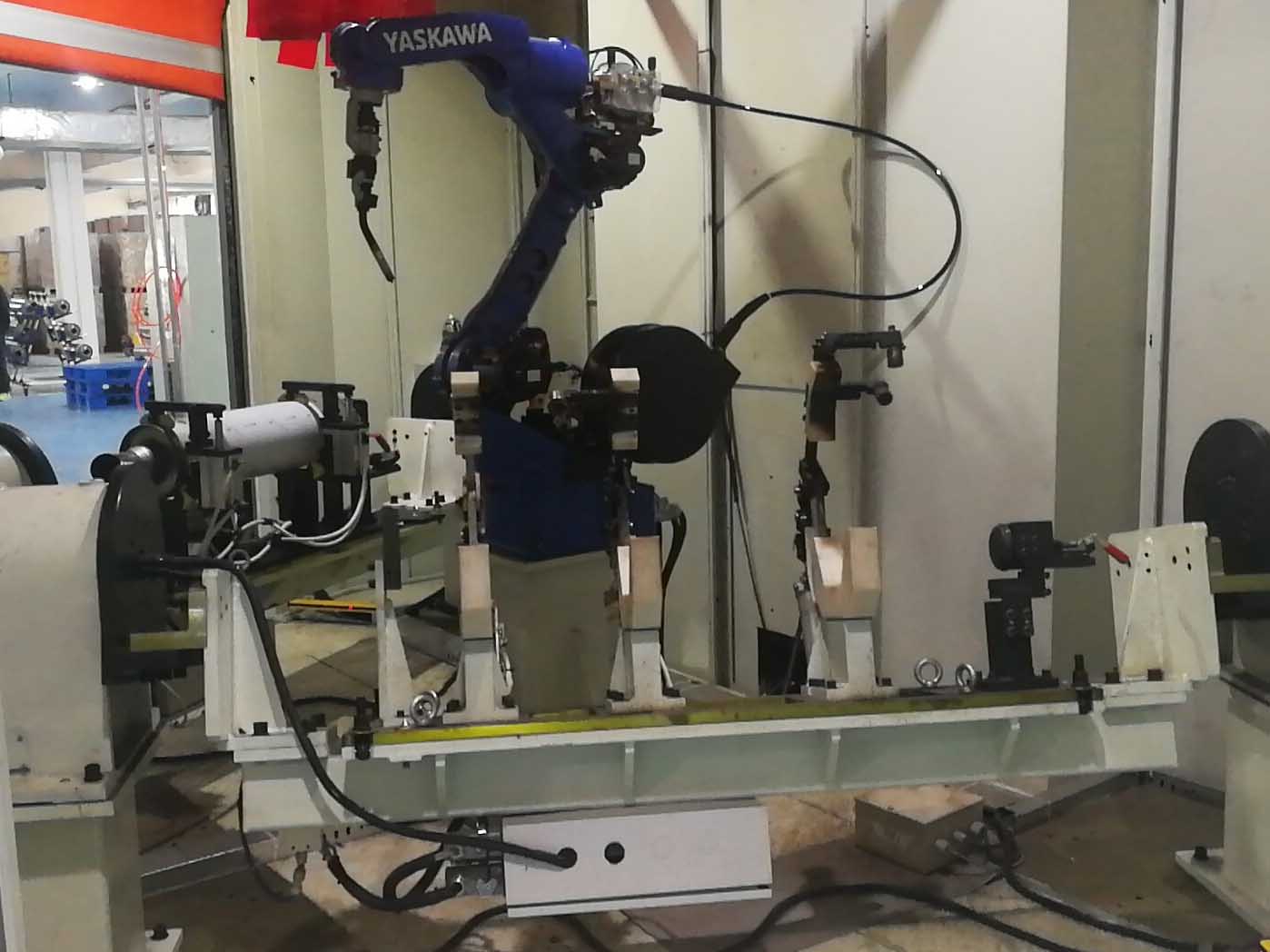
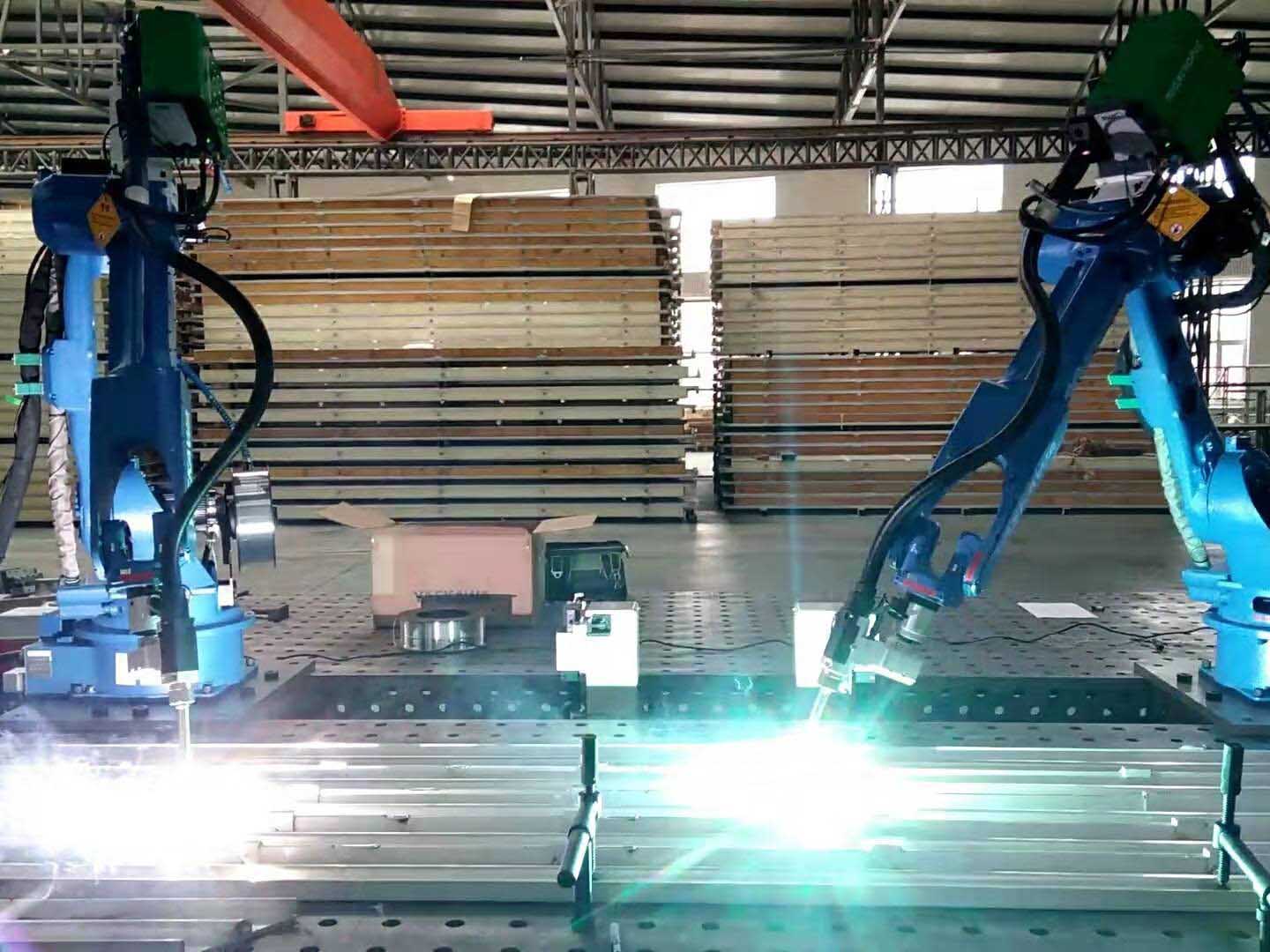
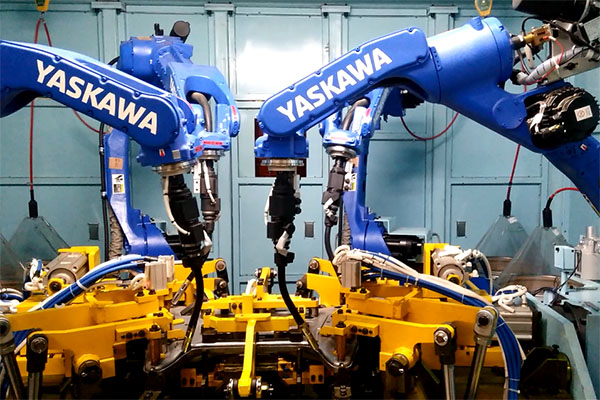
Som en teknologisk del af svejseprocessen, svejsningenrobotarbejdspladsbliver en "station" med svejsefunktion på produktionslinjen. Det er et relativt uafhængigt styresystem, hvor alle robottens operationer eller handlinger udføres af selve svejserobottens styresystem.
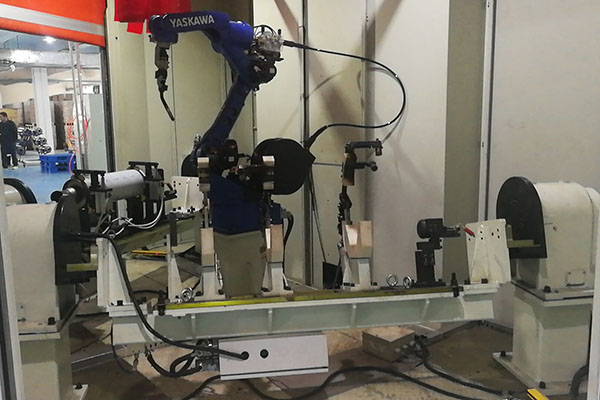



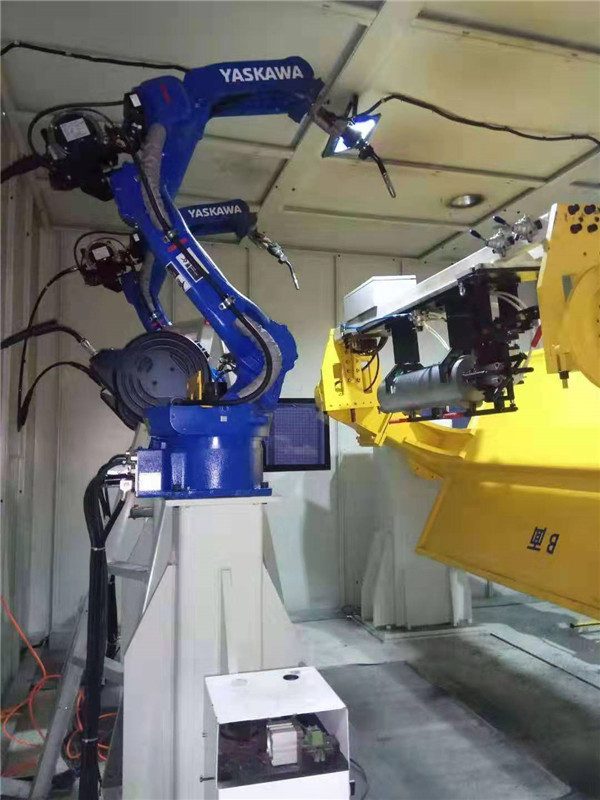
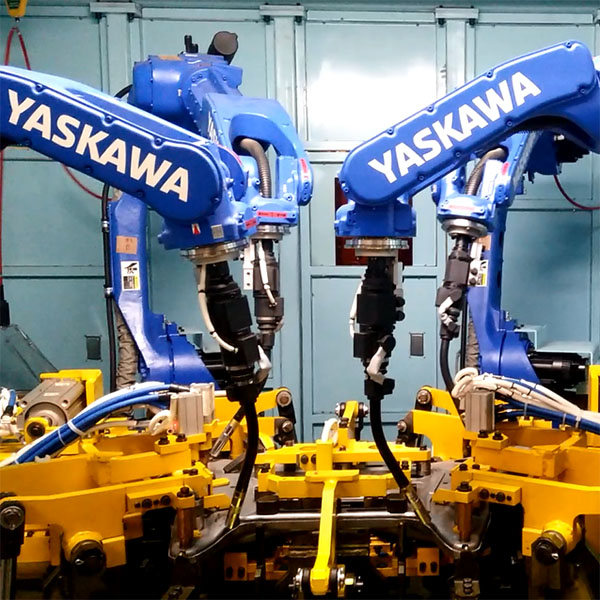
Udover svejserobotter,svejserobottens arbejdscellehar også jordskinner, positioneringsenheder, drejeborde, svejsesporingssystemer, sikkerhedshegn, pistolrensere, sikkerhedssystemer og perifert udstyr, der fungerer med svejserobotter.
Når densvejserobot-arbejdspladsNår robottens styreskab er i drift, modtager det eksterne signaler, såsom svejsning, teach-pendant, eksternt styreskab osv., og sender dataene til robotten, så svejseren kan nå svejsepositionen og fuldføre svejseopgaven. Svejsepistolen bruger svejsemaskinens høje strøm, og varmen, der genereres af højspændingen, koncentreres ved svejsepistolens terminal for at smelte svejsetråden og få den til at trænge ind i de dele, der skal svejses. Efter afkøling er de svejsede genstande fast forbundet til ét legeme. Trådboksen kan kontinuerligt og stabilt sende svejsetråden ud i henhold til de indstillede parametre, så svejsningen kan køre kontinuerligt, og svejseeffektiviteten forbedres. Den er matchet med pistolrensestationen for at rense svejseslaggen, sprøjte anti-sprøjtvæske og trimme svejsetråden for at sikre en svejseeffekt af høj kvalitet.
Svejserobottens eksterne styreskab styrer positioneringsenheden og sender motorparametre og data til styreskabet. Motoren driver svejseemnet til at stoppe med at rotere, så svejseemnet når en korrekt svejseposition og hjælper med at fuldføre svejsningen.