JSR's robot håndtering proces automatisering med YASKAWA håndteringsrobot anvendes til håndtering og udpakning af plastikpartikelposer, dens anøjagtig, pålidelig og bæredygtig håndtering, der bidrager med værdi til at fremme produktionsautomatisering.
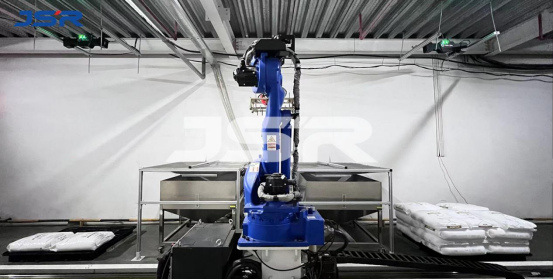
Uanset hvad angår aspekter af maskiner, landbrug, beklædning, byggeri eller dagligdag, kan vi se figuren af genbrugte plastikpartikler. Efter emballering skal disse partikler håndteres manuelt, hvilket er et intermitterende arbejde med høje omkostninger og høj arbejdsintensitet. Kundens tidligere arbejdstid var 8 timer, og hver pose med materialer var 25 kg. Den manuelle effektivitet er 2 poser i minuttet, og 960 poser kan skilles ad på en dag. Arbejdstiden efter robothåndtering og demontering er 24 timer, som kan betjenes kontinuerligt, og effektiviteten er 3 poser i minuttet, og 4320 poser kan skilles ad på en dag.
Løsningerne implementeret af Jiesheng for kunder: Yaskawa håndteringsrobot GP180, 7,5 m lang jordskinne, materialebeholder, materialestativ, GP180 maksimal belastning 180 kg, maksimal armspænd 2702 mm. Effektiv vandring på 7,5 m om jorden er 6 m, bevægelseshastighed er 0,7 m/s. 3D visuelt identifikationsblændingssystem. 3D visuel identifikation blanking system, kamera med indlæringsfunktion, gennem den tidlige materialedataopsamling og senere materialemodellering, så succesraten for kameragenkendelse er 99,9%.
Automatisk produktion forbedrer i høj grad arbejdseffektiviteten, stabil produktionskapacitet, nøjagtig levering, høj sikkerhed, rimelig brug af det eksisterende område, forbedrer virksomhedens image og værkstedsrenlighed for at opnå ubemandet produktion.
Indlægstid: 26. september 2022
